



无感控制,无刷电机在无转子位置传感器(霍尔传感器)的情况下,通过相应的算法和控制策略控制无刷电机的启动和稳定运行。特定的算法一般采用观测反电动势或者其他非直接位置传感器。
过零检测,无感控制的常用策略是通过检测反电动势的变化,判断无刷电机的转子位置,如图所示为无感控制的反电动势检测电路。
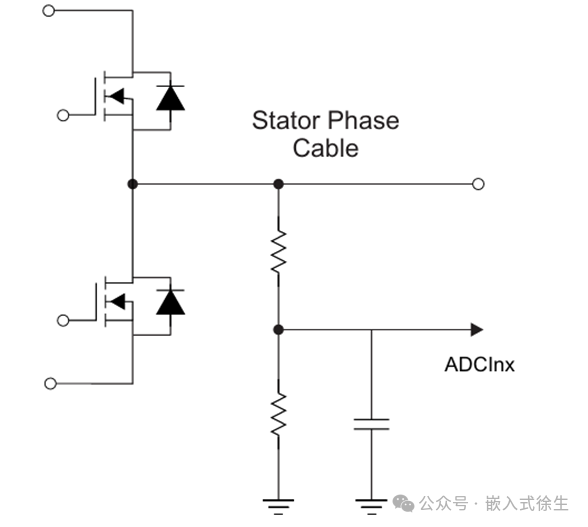
在无刷电机换相原理中,当无刷电机任意俩相通电的情况下,剩余的悬空相就能够检测到反电动势。在转子由0°转到60°期间,反电动势过零一次,这种操作也就是常说的过零检测。
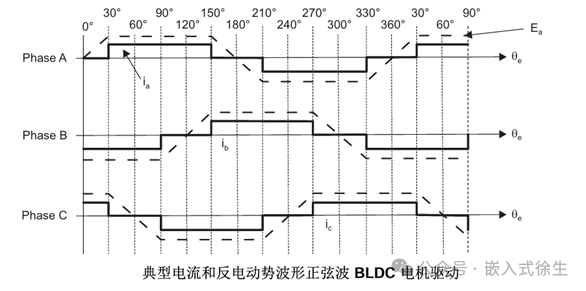
当无刷电机任意两相通电情况下,剩余悬空相就能检测到反电动势,检测到反电动势处于零点位置时,转子处于与悬空相同一方向(平行方向),即处于相位换相后移动30°,再移动30°角即为换相点。所以,在借助六个过零事件控制无刷电机,为了实现精确换相点,利用上一个换相周期的时间推算本周期30°延迟角的时间延迟。
无感控制的启动分为三个阶段,预定位、启动加速、闭环控制。
1)预定位 先给某两相通电一段时间,让转子转到预定的位置;通电占空比(一般30~50)和时间不要太大,易引起发热;通电时间、占空比需要依据不同的电机和负载情况确定;否则可能会由于长时间在一个线圈上加电烧坏,或者时间太短不能预定位。
2)启动加速 依据所要转动的方向,按转向顺序依次给各相通断电(换相);启动的过程,需要多次换相,并逐渐加速;同预定位一样,这个加速过程也与具体的电机和负载相关,需要结合实际测试来确定输出占空比的大小,换相频率太低,电机加速慢,会抖动反转,线圈也会发热严重;换相频率太高,电机运行起来容易失步,导致加速失败。
3)闭环控制 当启动加速到一定转速时,反电动势及其过零点可以被稳定的检测到时,就可以切换到闭环控制状态。
2 有感控制
无刷电机的有感控制指在无刷电机(BLDC)中,一般采用3个开关型霍尔传感器检测转子位置,根据3个霍尔传感器输出的编码控制MOS管的通断,进而实现换相。
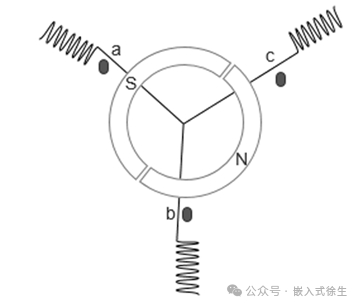 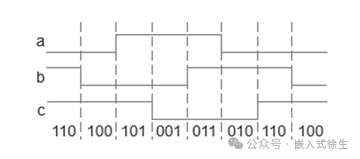 |
在无刷电机中一般把3个霍尔传感器间隔120°的圆周分布安装如图所示。输出信号高低电平各占180°角。设输出的高电平为1,低电平用0表示,则输出三个信号用二进制编码表示如上表。
转子每转动一周可以输出6个信号,正好可以对应六步方波换相的6个过程。我们可以按照出厂的真值表顺序去控制MOS管的开通和关断
3 磁场定向控制(FOC)
FOC(Field-Oriented Control),直译是磁场定向控制,也被称作矢量控制 (VC,Vector Control) ,是目前无刷直流电机(BLDC)和永磁同步电机(PMSM)高效控制的最优方法之一。FOC旨在通过精确地控制磁场大小与方向,使得电机的运动转矩平稳、噪声小、效率高,并且具有高速的动态响应。
定子磁场是固定的,而转子磁场随着转子的旋转而移动。当这两个磁场之间的夹角为90∘时,转子中的导体切割定子磁场的磁力线速度最快,这导致在转子导体中产生最大的感应电流。这些感应电流在定子磁场中受到的洛伦兹力也最大,因此产生的旋转力矩(即电磁转矩)也最大。所以如何使定子磁场和转子磁场一直相差90°,让电机一直产生最大力矩,就是FOC矢量控制所解决的问题。
FOC控制流程
FOC控制无刷电机过程,通过对无刷电机的三相电流采样进行Clarke变换,将三相正弦电流信号转换为两相正弦信号,再经Park变换(旋转变换),转换为两个直流信号作为电流闭环的输入,再经反Park变换和空间矢量脉宽调制控制三相全桥的开断,从而实现无刷电机的控制。
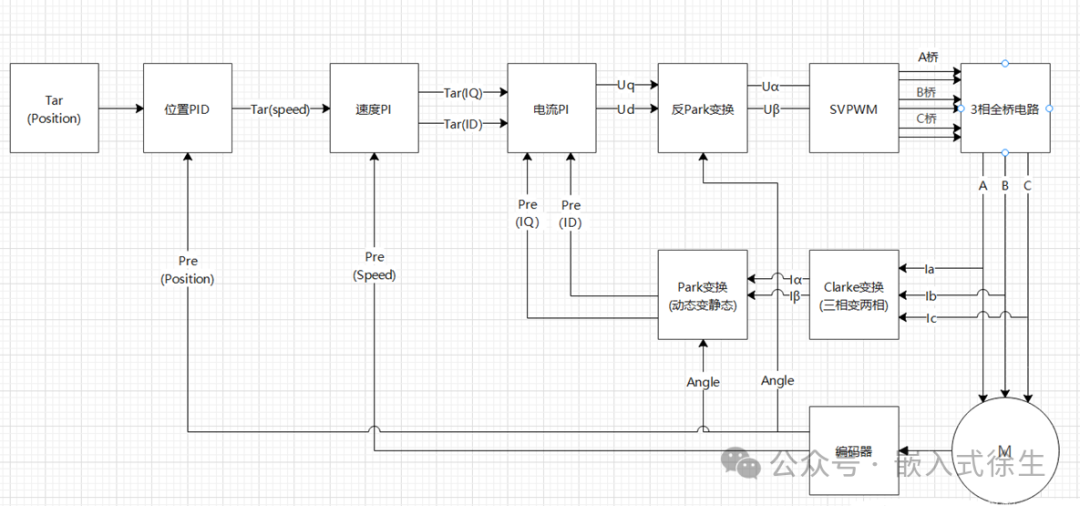
对上图的解释如下:
(1) 对电机的三相电流采样得到Ia Ib Ic,
(2) 将Ia Ib Ic, 经Clark变换得到
(3) 将 经Park变换得到Iq Id
(4) 计算Iq Id和设定值Iq_ref Id_ref误差
(5) 将上述的误差作为pid控制器中,得到输出控制电压Uq,Ud
(6) Uq,Ud进行反park变换
(7) 经svpwm模块(clark反变换)输出到mos管,产生定转子正交磁场,控制电机运转。
-
产品型号:ACM6731
2.7V-16V、2.4A峰值相电流、三相直流无刷电机驱动器
-
产品型号:ACM6732
2.7V-16V、2.4A峰值相电流、 三相直流无刷电机驱动器
-
产品型号:ACM6755
三相180˚ 正弦/方波, 无感或者外置霍尔的直流无刷电机驱动器, 180˚ 正弦/方波/开窗正炫可选
-
产品型号:ACM6763
三相180˚ 正弦, 无感或单霍尔,车规级无刷电机驱动
-
产品型号:ACM6754
三相180˚ 正弦/方波, 无感或者外置霍尔的直流无刷电机驱动器
-
产品型号:ACM6252
正弦波或方波驱动,外置霍尔的12V/1.2A单相无刷直流电机驱动器
-
产品型号:ACM6753
5-18V无感三相无刷电机驱动器